「人混みでも安全に移動できる自律移動サービスロボットの事業化検証」プロジェクト
代表:亀﨑允啓
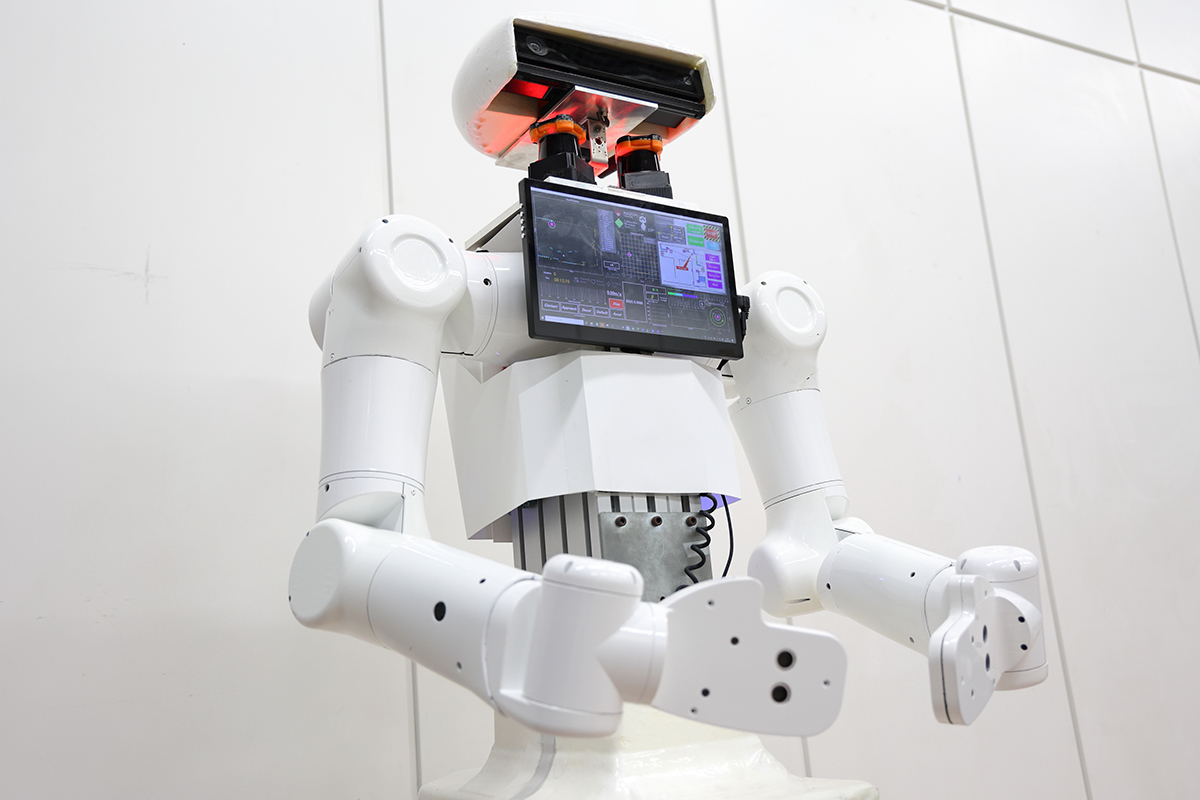
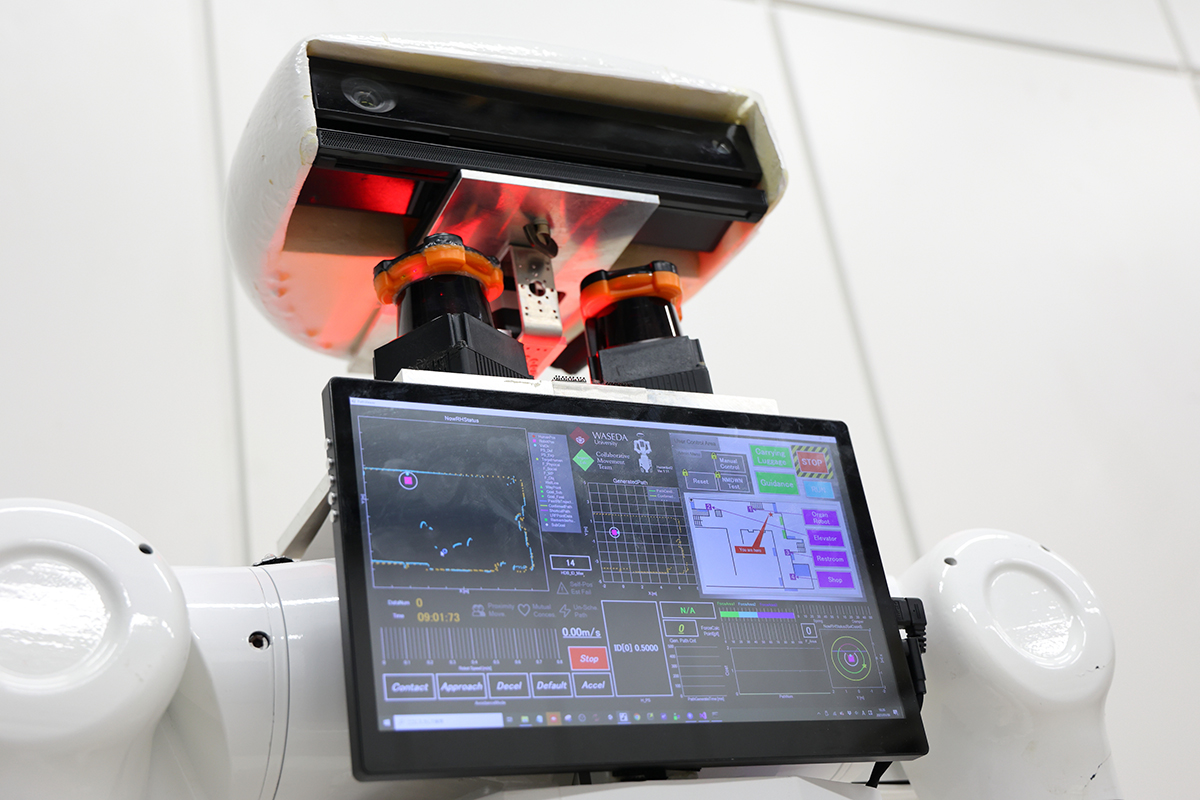
人との共有空間(特に、駅構内等の混雑環境)を安全かつシームレスに動ける自律移動サービスロボット(Mobile Service Robot: MSR)の早期実現が期待されていますが、人を最優先として「回避と停止」のみを行う従来の移動ロボットでは、根本的にこれに対応できません。そこで、人や環境から(へ)の身体的接触の許容を核に、人とロボットの相互譲り合い理論に基づく移動基盤技術「Human-Symbiotic Navigation Platform and Service (H-SYNAPSE)」を提案し、その有用性を確認してきました。本課題では、事業化の鍵となる、適用環境に応じたパラメータ調整手法の整備、多様な環境(展示会場、食堂等)で受容性評価、運搬や案内等を実施するMSRの市場・顧客調査から、事業化検証を行います。